.png?table=collection&id=1e16e373-c263-81c6-a9df-000bd9c77bef&t=1e16e373-c263-81c6-a9df-000bd9c77bef)
机器人视觉突破:深入解读蚂蚁灵波LingBot-Depth如何看清透明物
type
status
date
slug
summary
tags
category
icon
password
网址
引言:机器人眼中的“视觉盲区”
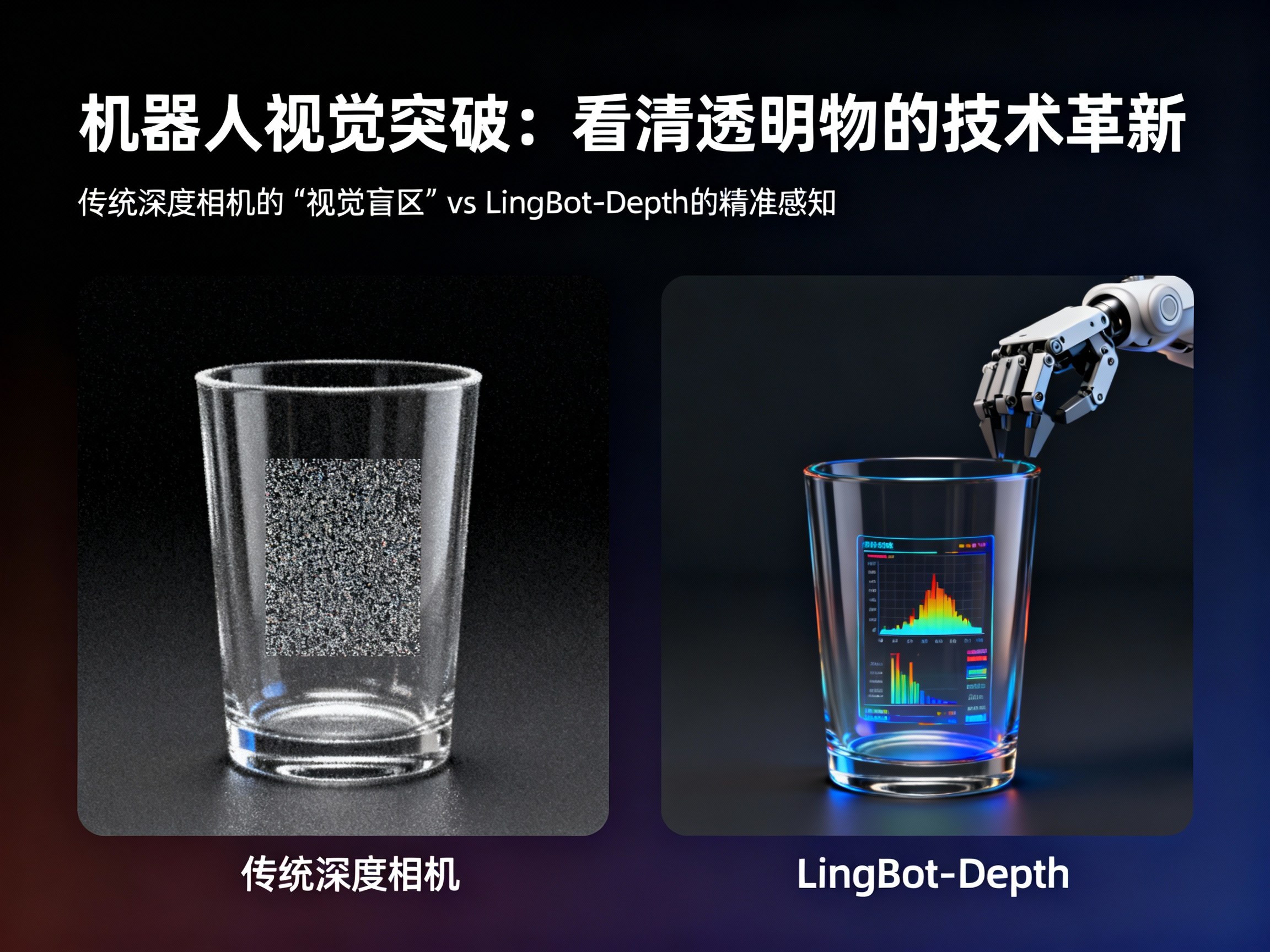
在人工智能和具身智能高速发展的今天,机器人已经能够完成许多复杂的动作,但它们依然面临一个困扰行业多年的“顽疾”:看不清透明和反光物体。无论是晶莹剔透的玻璃杯,还是光亮如镜的不锈钢餐具,在传统深度相机的眼中,往往是一片虚无或混乱的噪点。这种“视觉障碍”严重阻碍了机器人走进家庭、实验室及医院等复杂场景。
近日,蚂蚁集团旗下的具身智能公司蚂蚁灵波科技(Robbyant)发布并开源了全球领先的深度视觉模型——LingBot-Depth。这一技术的出现,标志着机器人视觉感知进入了一个全新的阶段。想要了解更多前沿的AI资讯和大模型动态,欢迎访问 AI门户。
技术核心:MDM掩码深度建模的“脑补”艺术
传统深度相机(如基于结构光或双目视觉的传感器)依赖物体表面的光线反射来计算距离。然而,透明材质会让光线穿透,高反光材质则会造成光线乱射。LingBot-Depth 的核心突破在于它不再试图“硬碰硬”地去捕捉这些光线,而是采用了一种名为 MDM(Masked Depth Modeling,掩码深度建模) 的全新范式。
蚂蚁灵波团队提出了一个极具启发性的观点:传感器在透明/反光区域的失效,本身就是一种极具价值的特征。MDM 将这些失效区域视为“天然掩码”(Natural Mask)。在训练过程中,模型被要求仅凭 RGB 彩色图像和剩余的有效深度信息,去“脑补”出被掩码遮住的深度数据。这种方法让模型学会了从环境倒影、折射畸变和物体轮廓中提取几何线索,从而实现精准的深度还原。
架构创新:ViT与ConvStack的强强联手
在技术架构上,LingBot-Depth 并没有沿用单一的路径,而是通过精妙的组合实现了性能跨越:
- 联合嵌入的ViT架构:模型采用 Vision Transformer (ViT-Large) 作为主干网络,通过自注意力机制学习 RGB 颜色信息与深度信息之间的精细对应关系,建立了强大的跨模态表征能力。
- 智能掩码策略:不同于常规的随机遮盖,MDM 优先利用传感器真实产生的缺失区域进行训练。这种“实战化”的训练策略,确保了模型在处理现实世界中的复杂材质时具有极高的鲁棒性。
- ConvStack解码器:在最后的重建阶段,LingBot-Depth 使用了卷积金字塔解码器。相比传统的 Transformer 解码器,它能更好地保留空间细节,让输出的深度图边缘更加锐利、平滑。
数据驱动:千万级数据集炼就的“火眼金睛”
一个强大的 AI 模型离不开高质量数据的喂养。蚂蚁灵波团队构建了一个规模达 1000 万的巨量数据集。其中包含 200 万来自真实场景(如商场、健身房、医院等)的数据,以及 100 万通过高保真仿真渲染生成的复杂材质数据。
特别值得一提的是,团队在仿真数据中模拟了真实传感器的成像缺陷,而非使用完美的渲染图。这种“带缺陷”的训练数据,反而让模型在面对现实中的廉价传感器时,展现出了超乎寻常的兼容性和准确度。目前,这类关于 LLM 和具身智能的深度研究已成为 人工智能 领域的热点,更多相关 AI日报 请持续关注 AIGC.BAR。
行业意义:不换硬件也能实现感知跃迁
LingBot-Depth 的开源对整个具身智能行业具有深远影响。最显著的优势在于它提供了“软硬协同”的降本增效方案。以往为了看清透明物体,开发者可能需要更换昂贵的激光雷达或特种传感器,而现在通过 LingBot-Depth 算法,普通的消费级深度相机也能实现专业级的感知效果。
在实际的机器人抓取实验中,搭载了该模型的机械臂面对透明杯和不锈钢器具时,抓取成功率大幅提升。这种“即插即用”的特性,将极大地加速机器人、自动驾驶以及 AR/VR 设备在复杂现实环境中的落地进程。
结论:具身智能的未来已来
“缺点,有时也是一种优势。”蚂蚁灵波通过巧妙利用传感器的失效信息,成功解决了机器人视觉的一大难题。LingBot-Depth 的开源精神不仅降低了行业研究门槛,也为我们展示了 Prompt 提示词之外,物理世界感知的无限可能。
随着更多开发者加入这一开源生态,我们有理由相信,未来的机器人将拥有一双真正能够“洞察万物”的眼睛。获取更多关于 openai、chatGPT 及 claude 的最新动态和 AI变现 案例,请锁定 AI门户网站。
Loading...